About
Academics
Resume
Contact
Projects
Achievements
About
hello!

My name is Mason, and I am currently a freshman at Rice University in Houston, Texas. I am triple majoring in Political Science, Social Policy Analysis, and Mathematical Economics with the hope of one day becoming a professor.
Outside of academics, I spend my time rock climbing, coding, and drinking too much coffee. I'm passionate about ideas, reading about them in books and executing them in code, and I always have a playlist of indie and alternative rock—usually The Strokes or Cage the Elephant—playing in the background.
Academics
Academics
Majors
Political Science
Social Policy Analysis
Mathematical Economic Analysis
Social Policy Analysis
Mathematical Economic Analysis
Minors
Data Science
Computational and Applied Mathematics
Politics, Law, and Social Thought
Financial Computation and Modeling
Computational and Applied Mathematics
Politics, Law, and Social Thought
Financial Computation and Modeling
Current Research
I am currently working on research at the University of Tulsa in the fields of Computer Science and Anthropology. Alongside 3 other undergraduate students, I am developing a novel experimental protocol under the mentorship of Professors Shultz and Tipton (Mechanical Engineering) and Professor Macdonald (Archaeology) to shed light on prehistoric tool use.
By programming a seven-axis Barrett WAM robotic arm to reproduce the precise scraping motions that ancient people likely employed—rubbing stone implements against leather surfaces over hundreds of cycles—we will capture authentic wear-and-tear patterns on the tools’ edges. These experimentally generated surfaces are then examined microscopically, allowing us to directly correlate specific motion trajectories with characteristic microscopic damage, and thereby infer how prehistoric artisans fashioned, handled, and maintained their stone tools.
By programming a seven-axis Barrett WAM robotic arm to reproduce the precise scraping motions that ancient people likely employed—rubbing stone implements against leather surfaces over hundreds of cycles—we will capture authentic wear-and-tear patterns on the tools’ edges. These experimentally generated surfaces are then examined microscopically, allowing us to directly correlate specific motion trajectories with characteristic microscopic damage, and thereby infer how prehistoric artisans fashioned, handled, and maintained their stone tools.
Barrett WAM Arm In Action
Resume
RESUME
Contact
Contact Me
Email:
mi30@rice.edu
LinkedIn:
mason-istre-082b83320
Instagram:
@mason__east
Thank you! Your message has been sent.
Projects
Projects
Self-Sustaining Space Terrarium

Capable of autonomously regulating carbon dioxide, oxygen, humidity, temperature, and pressure levels, the terrarium, provided a power source, can sustain both plant and animal life regardless of the external conditions it is placed in. Additionally, it posts all of the data gathered from the sensors onto a webserver that can be accessed remotely.
Smart Prosthetic Arm
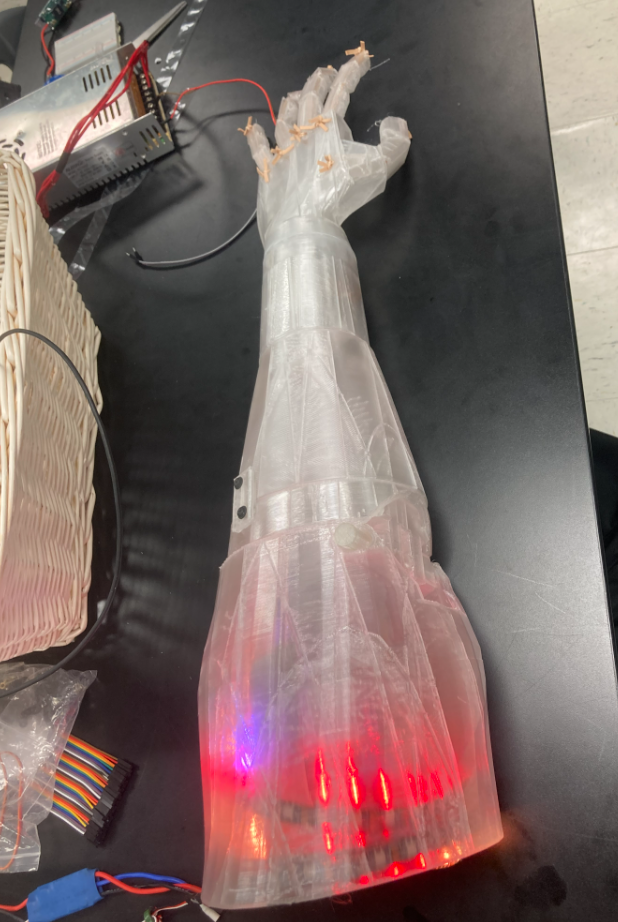
By mirroring the movements of the optimal arm and hand, the smart prosthetic arm is capable of precise, controlled movements while remaining affordable. Furthermore, the arm is fully modular with each stage independently powered. It is also fully 3-D printable, allowing potential users to resize the arm to fit their needs.
Hybrid Rocket
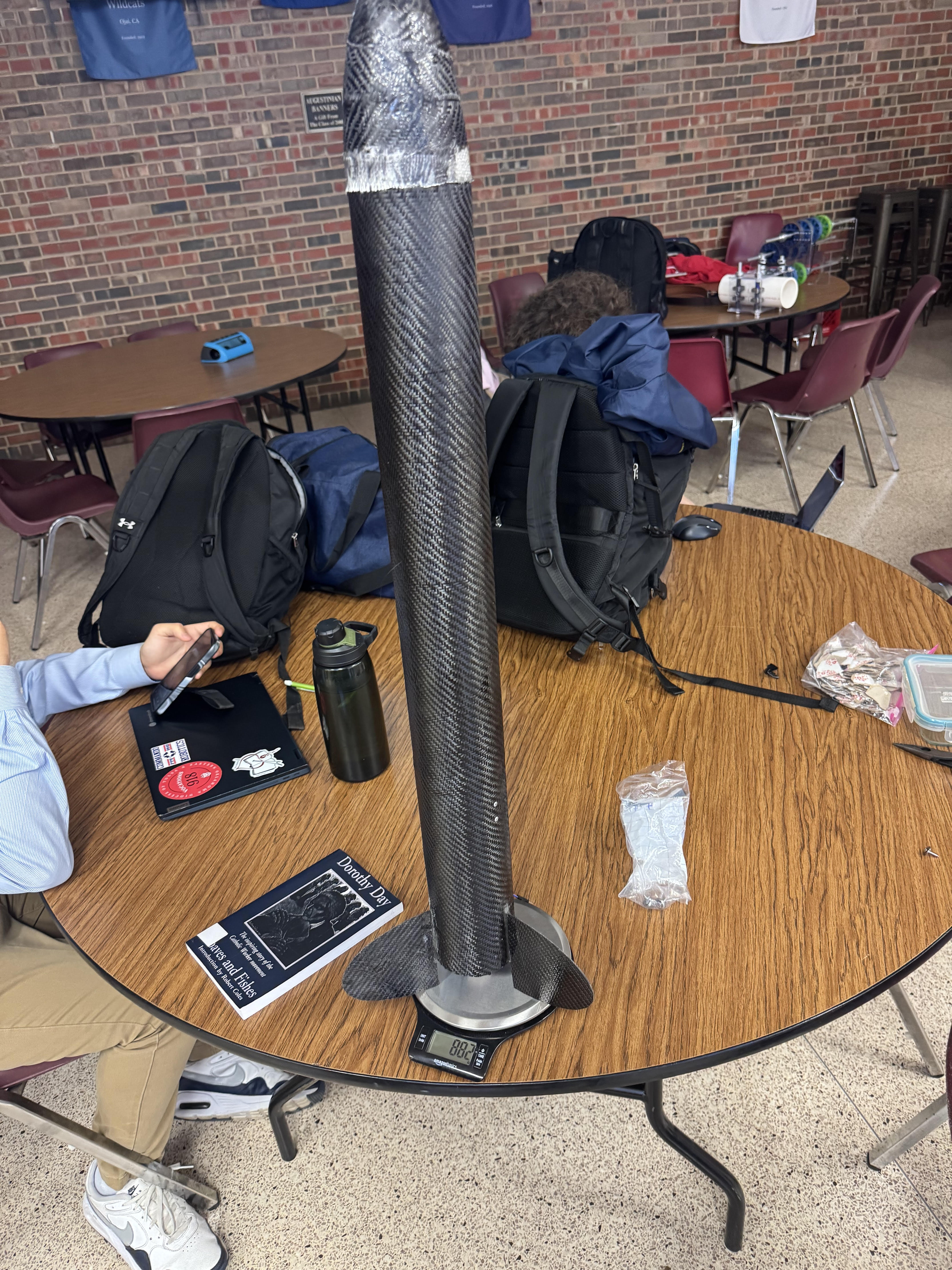
With both an electric stage and subsequent solid-fuel stage, the fully autonomous hybrid carbon fiber rocket combines the energy efficiency of an electric EDF motor with the range of a solid-fuel motor. The flight computer onboard the rocket also saves all the flight data to a csv file for post flight analysis.
Achievements
ACHIEVEMENTS
🏅 Eagle Scout
Boy Scouts of America
🎓 Rice Trustee Distinguished Scholarship
Rice University
🔬 2x ISEF Finalist
International Science & Engineering Fair
🎯 Accepted to Yale, Brown, & Cornell
Ivy League Universities
🏆 National Merit Finalist
National Merit Scholarship Program
📚 5's on 18 AP Exams
Advanced Placement Program